Quaternions
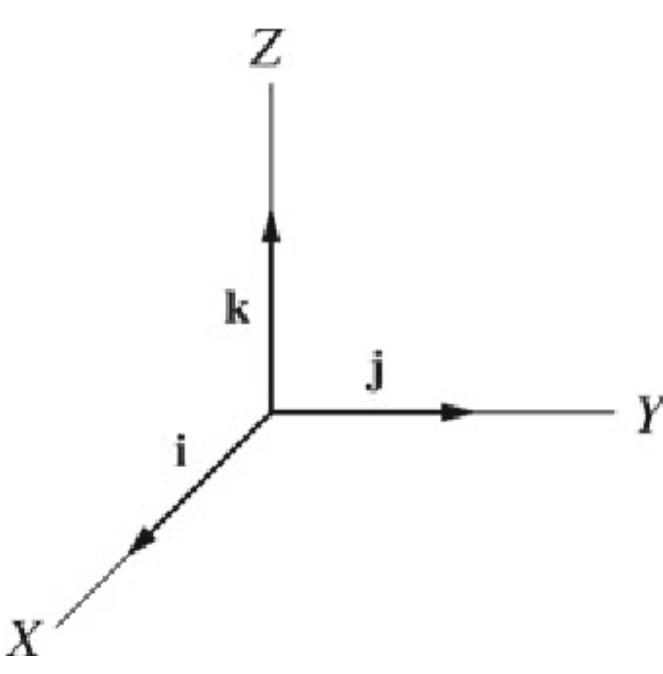
Quaternions provide a clever way to encode a 3d rotation about a particular axis in 3d space. It is widely used in game mechanics and 3d computer aided designs.
A Quaternion is represented by 4 numbers (4 dimensions) which encodes a 3d rotation in 3d space.
Imaginary Numbers??? Or vectors?
Recall how an imaginary number encodes a rotation. Let's define
Let's define multiplication as such.
This means applying a rotation
Doing so, you can derive other sets of expression. Like
Suppose we multiply
Thus
We can also prove that
These are all imaginary numbers! What?? Note that
If you were to square the matrix, using matrix multiplication, you would obtain
Why four dimensional space?
First of all, why would you introduce 4 dimensions, why can't a quaternion just be
Proof for 3d contradiction (Quaternions)
Conjugate
The conjugate of a quaternion is as such
Thus
Rotations
Let a
(
Where
A unit Quaternion existing on the surface of a hypersphere where
Where
Thus
We can represent a unit quaternion by
The inverse of
To rotate a vector