Linear Algebra
Linear Algebra (Elementary)
Vectors
Vectors are usually represented as column of numbers that encode a direction and magnitude.
The magnitude of a vector can be determined by summing the square of each term in the column and square rooting the result.
Dot Product
The Dot product of two vectors is
And
Look at derivation of the formula here
Cross Product
The cross product of two vectors creates another vector that is perpendicular to both vectors.
Where
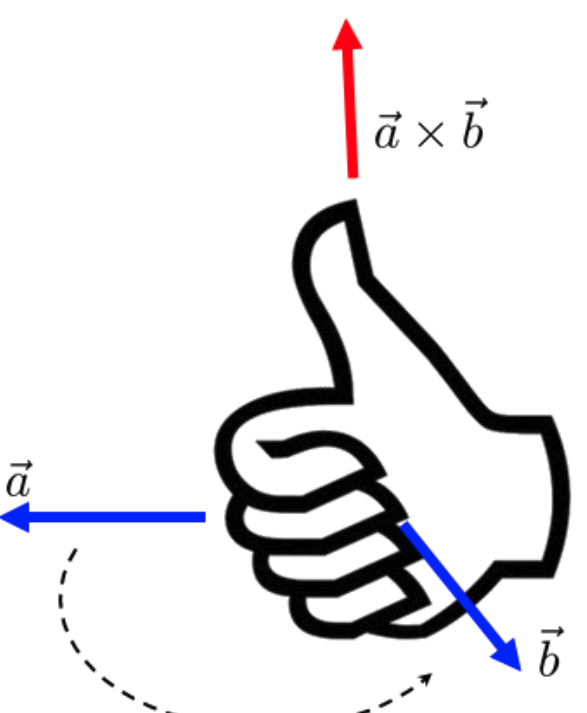
Your fingers curl from vector a to b, while your thumb represents the direction of
Thus
The determinant trick to finding cross product.
- Cover up the first row
- Multiply both sides diagonally and subtract it. (First element)
- Cover up second row
- Multiply both sides diagonally and subtract it. Multiply by -1. (Second element)
- Cover up third row
- Repeat step 2 (third element)
Area bounded by Vectors
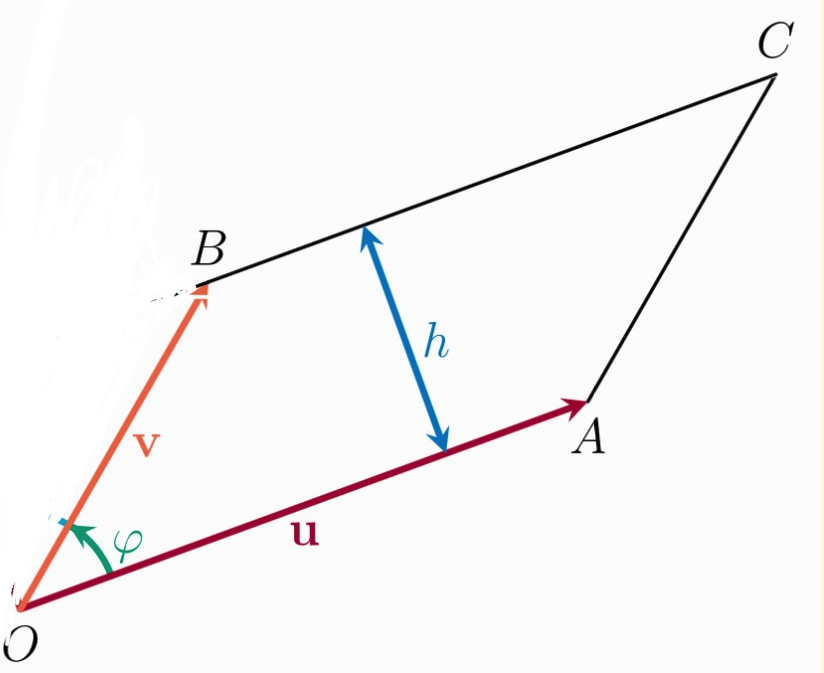
The area of the parallelogram can be deduced. Let
Thus
Thus the area of the parallelogram can be determined by the magnitude of the cross product of
Sample qn: Prove that the volume of a cuboid is. (This result is widely used in determinants and cross products)
Points, Lines, Planes
Point
A point is self-evidently a point in 3d space.
Lines
Starting from what we know best
A line in a vector space can be described as
Distance between Point and Line
The distance between
Planes
Starting from what we know. The equation of a plane in Cartesian form is
Using the properties of dot product, it can be rewritten as
or
where
Line of Intersection between two planes
Given two planes
The line of intersection can be found by keying this into GDC (menu - 3 - 2)
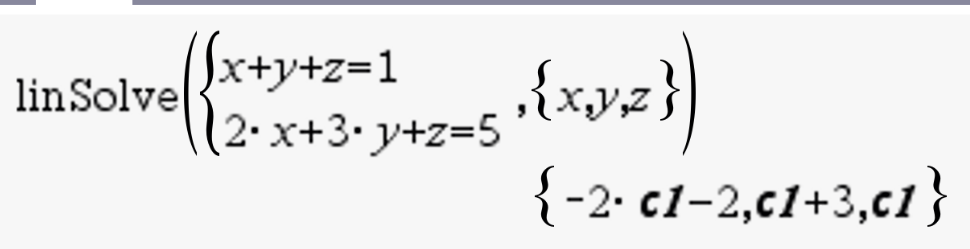
Thus
Intersection of Planes
Given three planes (
However, the planes has
Distinguishing between no solutions & Infinite solutions
! If
:
- Find
: the line of intersection between and
- Check if the below condition is true. If yes, then
lies on , suggesting that there are infinite solutions. If not, there are no solutions
Distance between two parallel planes
where
Linearity
Formal definition of Linearity #Linearity
- Additivity:
- Scaling:
Where
Matrices
Recall how a function in algebra transforms x to y?
In linear algebra, instead of x and y's which are scalar values, linear algebra transforms vectors into another vector.
However, to make the distinction clearer, mathematicians use A instead of f.
We need special tools to work with vectors, and this is where matrices comes in. A matrix encodes a Linear transformation on a vector, similar to how a function (f) encodes a transformation of x to y.
eg.
where A is a matrix and
Note that the dim of a vector has to be the same as the number of columns of matrix (A).
Matrix Multiplication (How does it transform between
Matrix multiplication
- Take the nth row of numbers in A
- Pivot it clockwise by 90 degrees into the mth column in
- Multiply it respectively with the variable associated with it
- Add up all the numbers in the column
- The value would be on the nth row and mth column in
Thus
Bravo!! We have transformed
System of Linear Equations
A matrix also encodes a system of linear equations. Suppose there are 2 equations as shown, and we want to solve for a and b.
A matrix representation of the above is as given
look, aren't they equivalent??
Solving for the coefficients are as easy as
Where the inverse of the matrix is essentially the reverse of its transformation, similar to how
Transpose
Transpose means to flip a vector or a matrix around a diagonal #Transpose
Thus
In the case of matrices
Another property is that
Determinant
Determinant measures the transformation of space and volume.
A matrix that maps basis vector
The volume by the three basis vectors is given as
The determinant, measures ratio between the initial volume of three basis vectors, and its final volume after being scaled by
where
Fun fact
The determinant tells us about the invertibility of the Matrix
Eigenvector and Eigenvalue
An eigenvector of a matrix is a nonzero vector that, when the matrix is applied to it, is scaled by a factor
A linear system
Thus to find non zero solution of
Solving for
Linear Algebra (Modern)
Infinite Vectors and Functional Spaces
"The only thing limiting us in Math is our imagination" ~ Joshua
Functions are vectors. What? Yes it's true. All functions are an infinite vector and these infinite vectors live within something called a Functional Space.
Introduction to Infinite-dimensional vectors functions
Take a function
Orthogonal Basis
Suppose
Recall that in Euclidean space, a linear combination of two orthogonal (perpendicular) vectors,
Thus we need to find two functions where its dot product is 0.
When dealing with finite vectors, the dot product is defined as such, where each element in the vector is multiplied and summed together.
Similarly, in the context of infinite vectors, it is defined as
Fourier discovered that the two functions
Thus,