Suppose a particle follows the path of . It's velocity is given by . Thus its velocity vector is always perpendicular to its position (Recall that is a degree rotation). As such, it will move in a circular motion. and .
Generalisation
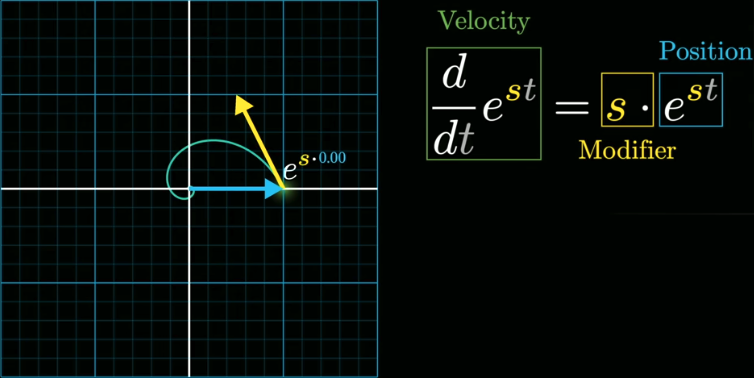
Suppose a particle follows the path of where and . Let .
Intuition
Consider initial position at . The velocity of the particle is . Thus, the particle at will have a velocity (in yellow). If , is pulling the particle inwards, causing it to spiral inwards. If , is pushing the particle outwards, causing it to spiral outwards. As increases, it's angular frequency increases, causing it to move faster in a circular motion. Thus , .
determines the rate of change of magnitude. determines the angular frequency of the particle ().
Why do we care?
Consider a scenario of a mass on spring placed horizontally.
The force acting on the mass can be modelled as such.
: spring constant : damping term (friction, air resistance) : displacement from equilibrium. : velocity
It describes how the spring and damping will exert a force on the mass to resist its direction of motion. We can rewrite it as
Let's guess that the solution of is . Thus
Solving for gives
For simplicity, let's assume that is .
What does this mean? It basically means that the natural frequency of the system is . Since , its amplitude does not change.
BUT WAIT!!! There are two solutions for , but in fact, there are a whole family of solutions for !
Linearity
If solves
and solves
Then solves it as well.
Thus, there are a whole family of equations that satisfy the conditions
Thus, the equation is just the linear combination of the complex exponential of .
In physics, a lot of functions can be expressed as
Introduction
A Laplace transform is a "function" that maps one function in time-domain to another function in the s domain. where
And
Lets consider the simplest case where
Consider now,
The Laplace transform of has a pole at where . Thus we have figured out what values of are embedded in the function .
Consider now . . (Recall Complex Numbers)
Its Laplace transform is
The poles in its Laplace transform at helps us identify the family of equations that describes . Typically, the expression is unknown, thus integration by parts is usually used to get the poles of the equation.